Автор: merakiki
Перевод: TechFlow
На протяжении десятилетий область применения робототехники была крайне узкой, в основном ограничиваясь выполнением повторяющихся задач в структурированных условиях заводов. Однако современные технологии искусственного интеллекта (AI) радикально меняют сферу робототехники, позволяя роботам понимать и выполнять команды пользователей, а также адаптироваться к динамично меняющейся среде.
Мы вступаем в эпоху стремительного роста. По прогнозам Citi, к 2035 году в мире будет развернуто 1,3 миллиарда роботов, а сфера их применения расширится от заводов до домашних хозяйств и сферы услуг. В то же время Morgan Stanley ожидает, что только рынок гуманоидных роботов к 2050 году может достичь 5 триллионов долларов.
Несмотря на огромный рыночный потенциал, это расширение сопровождается серьёзными вызовами в области централизации, доверия, приватности и масштабируемости. Технологии Web3, поддерживающие децентрализованные, верифицируемые, защищающие приватность и кооперативные сети роботов, предлагают революционные решения для этих проблем.
В этой статье мы подробно рассмотрим эволюционирующую цепочку создания стоимости AI-роботов, с особым акцентом на гуманоидных роботах, и раскроем захватывающие возможности, возникающие на стыке AI-роботов и технологий Web3.
Цепочка создания стоимости AI-роботов
Цепочка создания стоимости AI-роботов состоит из четырёх основных уровней: аппаратное обеспечение, интеллект, данные и агенты. Каждый уровень строится на предыдущих, позволяя роботам воспринимать, рассуждать и действовать в сложных реальных условиях.
В последние годы аппаратный уровень достиг значительного прогресса благодаря таким лидерам отрасли, как Unitree и Figure AI. Однако на неаппаратных уровнях по-прежнему сохраняются ключевые проблемы, особенно нехватка качественных датасетов, отсутствие универсальных базовых моделей, слабая совместимость между устройствами и потребность в надёжных edge-вычислениях. Поэтому сегодня наибольшие возможности для развития открываются на уровне интеллекта, данных и агентов.
1.1 Аппаратный уровень: «Тело»
Сегодня создание и внедрение современных «тел роботов» стало проще, чем когда-либо. На рынке уже представлено более 100 различных типов гуманоидных роботов, включая Optimus от Tesla, G1 от Unitree, Digit от Agility Robotics и Figure 02 от Figure AI.
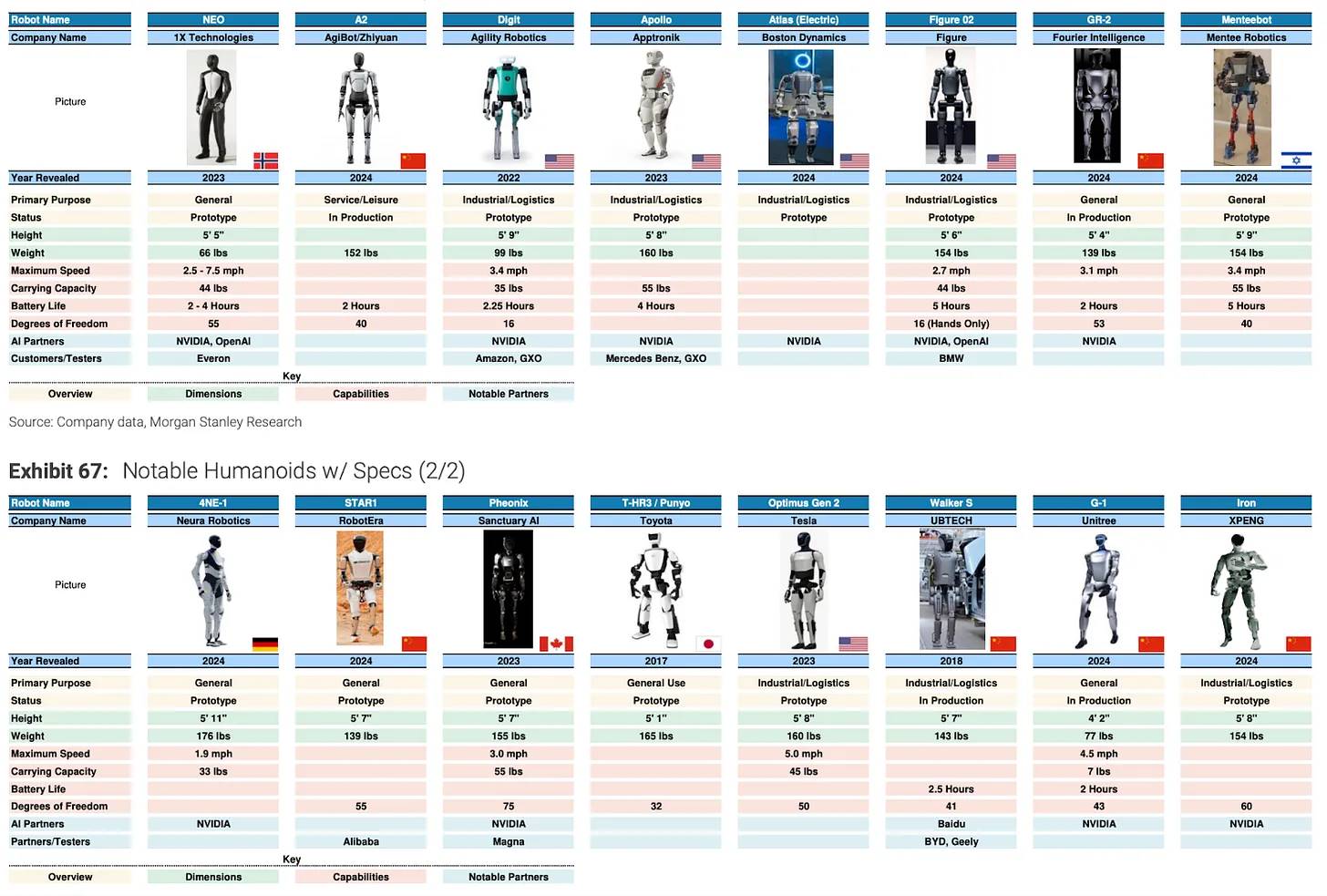
Источник: Morgan Stanley, «Humanoid 100: карта цепочки создания стоимости гуманоидных роботов»
Этот прогресс стал возможен благодаря трём ключевым технологическим прорывам:
-
Приводы (Actuators): выполняют роль «мышц» робота, преобразуя цифровые команды в точные движения. Инновации в области высокопроизводительных электродвигателей позволяют роботам совершать быстрые и точные действия, а диэлектрические эластомерные приводы (Dielectric Elastomer Actuators, DEAs) подходят для тонких задач. Эти технологии значительно увеличили гибкость роботов, например, Optimus Gen 2 от Tesla обладает 22 степенями свободы (DoF), а G1 от Unitree демонстрируют гибкость, близкую к человеческой, и впечатляющие возможности передвижения.
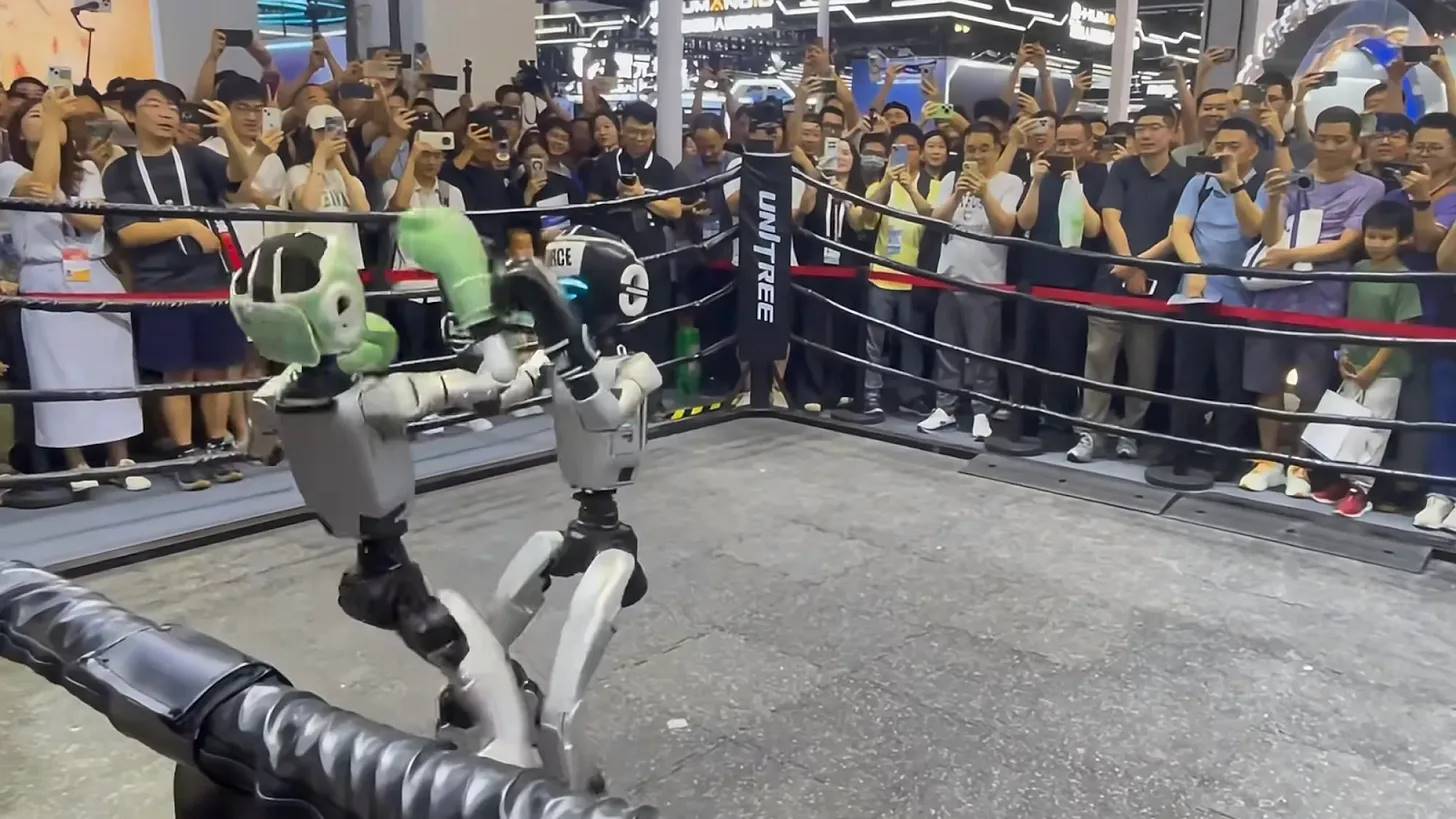
Источник: Unitree демонстрирует своего новейшего гуманоидного робота на боксерском поединке на WAIC 2025
-
Датчики (Sensors): современные датчики с помощью зрения, LIDAR/RADAR, тактильных и аудиовходов позволяют роботам воспринимать и интерпретировать окружающую среду. Эти технологии обеспечивают безопасную навигацию, точные манипуляции и контекстное восприятие.
-
Встроенные вычисления (Embedded Computing): процессоры, GPU и AI-ускорители (например, TPU и NPU) на устройстве позволяют обрабатывать данные с датчиков и запускать AI-модели в реальном времени, обеспечивая автономные решения. Надёжное соединение с низкой задержкой гарантирует бесперебойную координацию, а гибридная архитектура edge-облако позволяет роботам передавать ресурсоёмкие задачи при необходимости.
1.2 Уровень интеллекта: «Мозг»
По мере совершенствования аппаратного обеспечения внимание отрасли смещается к созданию «мозга робота»: мощных базовых моделей и передовых стратегий управления.
До интеграции AI роботы полагались на правил-основанную автоматизацию, выполняя заранее запрограммированные действия и не обладая адаптивным интеллектом.
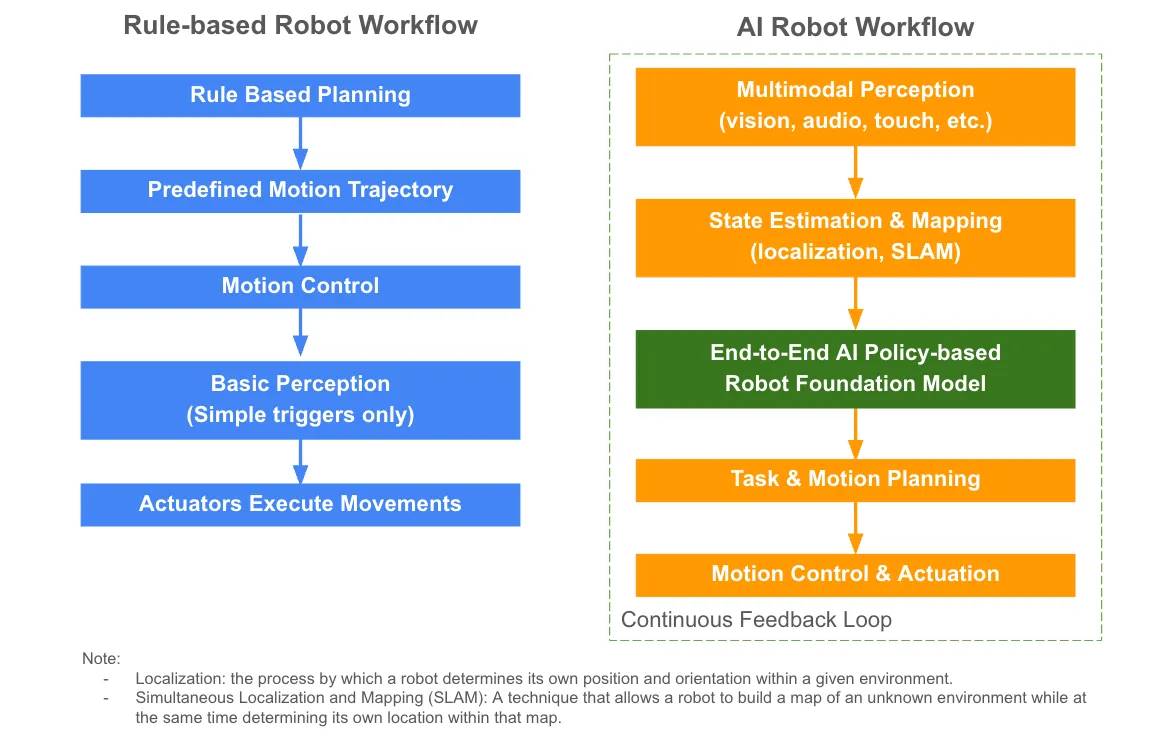
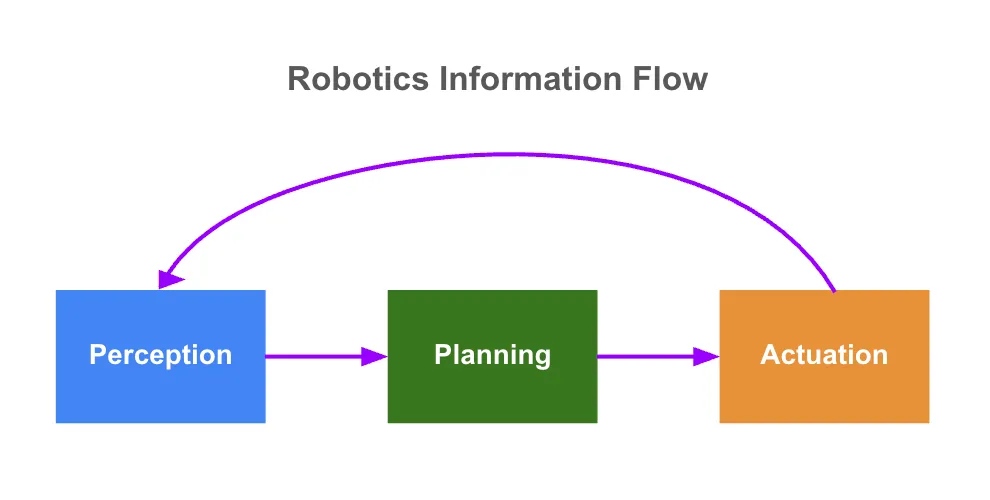
Базовые модели постепенно внедряются в робототехнику. Однако одних только универсальных больших языковых моделей (LLMs) недостаточно, поскольку роботам необходимо воспринимать, рассуждать и действовать в динамической физической среде. Для этого отрасль разрабатывает основанные на стратегиях end-to-end базовые модели для роботов. Эти модели позволяют роботам:
-
Воспринимать (Perceive): получать мультимодальные данные с датчиков (визуальные, аудио, тактильные)
-
Планировать (Plan): оценивать собственное состояние, строить карту окружающей среды и интерпретировать сложные команды, напрямую сопоставляя восприятие с действиями, минимизируя ручную настройку
-
Действовать (Act): генерировать планы движения и выдавать управляющие команды для выполнения действий в реальном времени
Эти модели учатся универсальным «стратегиям» взаимодействия с миром, что позволяет роботам адаптироваться к различным задачам и работать с большей интеллектуальностью и автономией. Продвинутые модели используют постоянную обратную связь, позволяя роботам учиться на опыте и ещё лучше адаптироваться к изменяющейся среде.
Модели VLA напрямую сопоставляют сенсорные входные данные (в основном визуальные данные и команды на естественном языке) с действиями робота, позволяя ему выдавать соответствующие управляющие команды на основе того, что он «видит» и «слышит». Примеры: RT-2 от Google, Isaac GR00T N1 от Nvidia и π0 от Physical Intelligence.
Для усиления этих моделей обычно интегрируются различные дополнительные методы, например:
-
Мировые модели (World Models): создают внутренние симуляции физической среды, помогая роботам учиться сложному поведению, предсказывать результаты и планировать действия. Например, Genie 3 от Google — универсальная мировая модель, способная генерировать беспрецедентно разнообразные интерактивные среды.
-
Глубокое обучение с подкреплением (Deep Reinforcement Learning): помогает роботам обучаться поведению методом проб и ошибок.
-
Дистанционное управление (Teleoperation): позволяет управлять роботами удалённо и собирать обучающие данные.
-
Обучение по демонстрации (LfD)/Имитационное обучение (Imitation Learning): обучает роботов новым навыкам путём имитации действий человека.
На рисунке ниже показано, как эти методы интегрируются в базовые модели роботов.
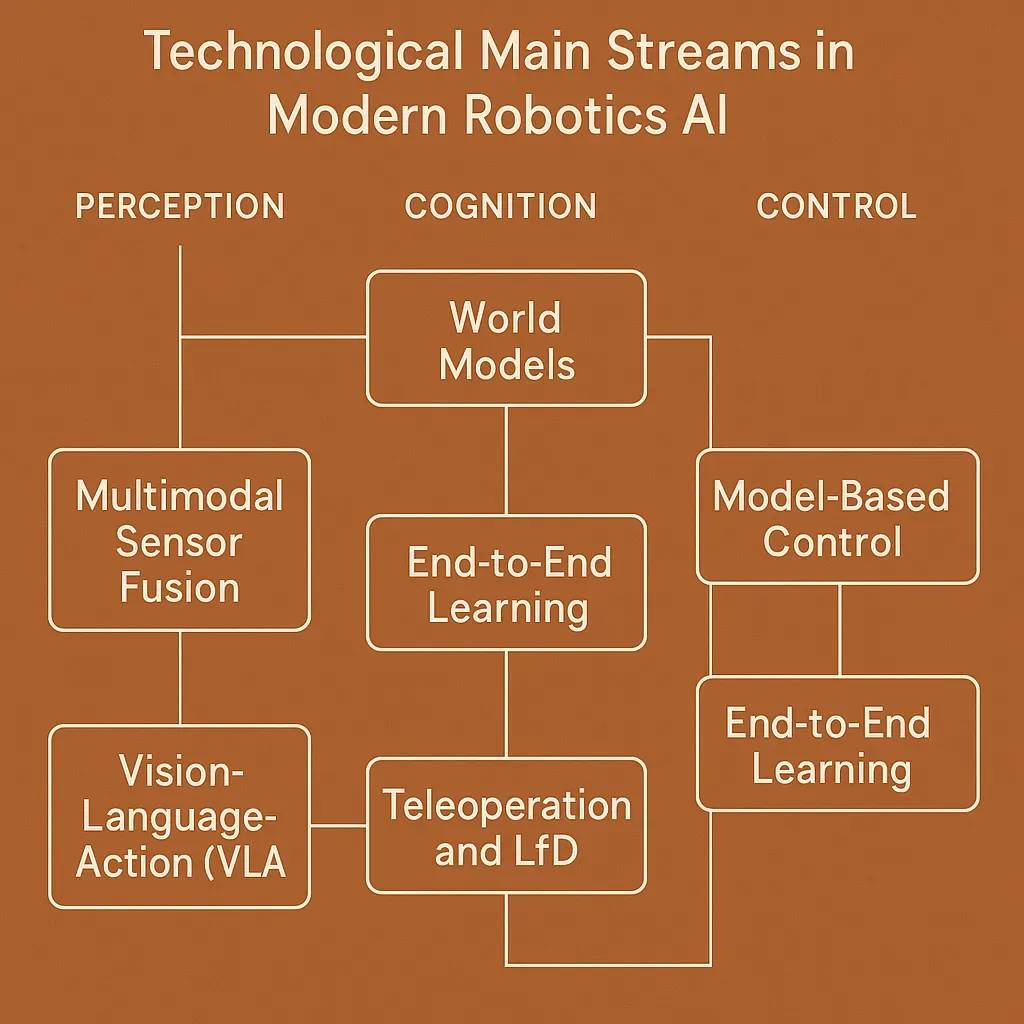
Источник: World models: the physical intelligence core driving us toward AGI
Недавние достижения с открытым исходным кодом, такие как π0 от Physical Intelligence и Isaac GR00T N1 от Nvidia, знаменуют важный прогресс в этой области. Однако большинство базовых моделей для роботов по-прежнему централизованы и закрыты. Компании вроде Covariant, Tesla и другие сохраняют проприетарный код и датасеты, в основном из-за отсутствия открытых стимулов.
Отсутствие прозрачности ограничивает сотрудничество и совместимость между роботизированными платформами, подчеркивая необходимость стандартов для безопасного и прозрачного обмена моделями, ончейн-управления сообществом и слоя совместимости между устройствами. Такой подход будет способствовать доверию, сотрудничеству и дальнейшему развитию отрасли.
1.3 Уровень данных: «Знания» мозга
Мощные датасеты для роботов опираются на три столпа: объём, качество и разнообразие.
Несмотря на усилия отрасли по накоплению данных, существующие датасеты для роботов всё ещё слишком малы. Например, GPT-3 от OpenAI обучалась на 300 миллиардах токенов, а крупнейший открытый датасет для роботов Open X-Embodiment содержит лишь более 1 миллиона реальных траекторий роботов, охватывающих 22 типа роботов. Это значительно меньше объёма данных, необходимого для мощной генерализации.
Некоторые проприетарные методы, например, сбор данных Tesla с помощью data factory, где сотрудники носят костюмы захвата движения для генерации обучающих данных, действительно позволяют собирать больше реальных движений. Однако такие методы дороги, ограничены по разнообразию данных и плохо масштабируются.
Для решения этих проблем в робототехнике используются три основных источника данных:
-
Интернет-данные: интернет-данные масштабируемы и легко расширяемы, но в основном являются наблюдательными и не содержат сенсорных и моторных сигналов. Предобучение крупных визуально-языковых моделей (например, GPT-4V и Gemini) на интернет-данных даёт ценные семантические и визуальные априори. Кроме того, добавление кинематических меток к видео позволяет превращать их в пригодные для обучения данные.
-
Синтетические данные: симуляции позволяют быстро проводить масштабные эксперименты и охватывать разнообразные сценарии, но не могут полностью отразить сложность реального мира — это ограничение известно как «разрыв между симуляцией и реальностью» (sim-to-real gap). Исследователи решают эту проблему с помощью адаптации домена (например, аугментация данных, доменная рандомизация, adversarial learning) и переноса из симуляции в реальность, итеративно оптимизируя модели и дообучая их в реальных условиях.
-
Данные из реального мира: несмотря на их дефицит и высокую стоимость, реальные данные критически важны для внедрения моделей и преодоления разрыва между симуляцией и практикой. Качественные реальные данные обычно включают эгоцентричные виды (egocentric views), фиксирующие, что «видит» робот во время выполнения задачи, а также моторные данные, отражающие его точные движения. Моторные данные обычно собираются с помощью человеческих демонстраций или дистанционного управления, используя VR, костюмы захвата движения или тактильное обучение, чтобы модель училась на точных реальных примерах.
Исследования показывают, что комбинированное обучение роботов на интернет-данных, реальных и синтетических данных значительно повышает эффективность обучения и устойчивость моделей (прим. TechFlow: устойчивость — способность системы сохранять работоспособность в условиях сбоев и опасностей).
При этом увеличение объёма данных помогает, но разнообразие данных ещё важнее, особенно для генерализации на новые задачи и формы роботов. Для достижения такого разнообразия необходимы открытые платформы данных и кооперативный обмен, включая создание кросс-инстансных датасетов, поддерживающих различные формы роботов, что способствует развитию более мощных базовых моделей.
1.4 Уровень агентов: «Физические AI-агенты»
Тренд развития физических AI-агентов ускоряется — это автономные роботы, способные действовать в реальном мире самостоятельно. Прогресс на уровне агентов зависит от тонкой настройки моделей, непрерывного обучения и практической адаптации к уникальной морфологии каждого робота.
Вот несколько новых возможностей для ускорения развития физических AI-агентов:
-
Непрерывное обучение и адаптивная инфраструктура: благодаря циклам обратной связи в реальном времени и обмену опытом во время эксплуатации роботы могут постоянно совершенствоваться.
-
Экономика автономных агентов: роботы функционируют как независимые экономические субъекты — обмениваются ресурсами (вычисления, данные с датчиков) на рынке роботов и получают доход от токенизированных сервисов.
-
Мультиагентные системы: новые платформы и алгоритмы позволяют группам роботов координироваться, сотрудничать и оптимизировать коллективное поведение.
Слияние AI-роботов и Web3: раскрытие огромного рыночного потенциала
По мере перехода AI-роботов из исследовательской стадии к реальному внедрению, ряд давних узких мест сдерживает инновации и ограничивает масштабируемость, устойчивость и экономическую эффективность экосистемы роботов. К этим узким местам относятся централизованные изолированные данные и модели, отсутствие доверия и отслеживаемости, ограничения приватности и комплаенса, а также недостаточная совместимость.
2.1 Проблемы AI-роботов
-
Централизованные изолированные данные и модели
Моделям роботов нужны большие и разнообразные датасеты. Однако сегодня данные и разработка моделей крайне централизованы, фрагментированы и дороги, что приводит к разобщённости систем и слабой адаптивности. Роботы, внедряемые в динамичной реальной среде, часто показывают низкую производительность из-за недостатка разнообразия данных и ограниченной устойчивости моделей.
-
Доверие, отслеживаемость и надёжность
Отсутствие прозрачных и аудируемых записей (о происхождении данных, процессе обучения моделей и истории операций роботов) подрывает доверие и ответственность. Это становится основным препятствием для пользователей, регуляторов и бизнеса при внедрении роботов.
-
Приватность, безопасность и комплаенс
В чувствительных сферах, таких как медицина и домашние роботы, защита приватности критически важна, а также необходимо соблюдать строгие региональные нормы (например, GDPR в Европе). Централизованная инфраструктура с трудом поддерживает безопасное и приватное AI-сотрудничество, что ограничивает обмен данными и сдерживает инновации в регулируемых или чувствительных областях.
-
Масштабируемость и совместимость
Роботизированные системы сталкиваются с серьёзными трудностями при совместном использовании ресурсов, коллективном обучении и интеграции между различными платформами и формами. Эти ограничения приводят к фрагментации сетевых эффектов и мешают быстрому переносу возможностей между разными типами роботов.
2.2 AI-роботы x Web3: структурные решения открывают инвестиционные возможности
Технологии Web3 с помощью децентрализованных, верифицируемых, защищающих приватность и кооперативных сетей роботов фундаментально решают вышеуказанные проблемы. Такое слияние открывает новые инвестиционные рыночные возможности:
-
Децентрализованная кооперативная разработка: благодаря стимулируемым сетям роботы могут совместно использовать данные, разрабатывать модели и интеллектуальных агентов.
-
Верифицируемая отслеживаемость и ответственность: блокчейн обеспечивает неизменяемые записи о происхождении данных и моделей, идентичности роботов и истории операций, что критически важно для доверия и комплаенса.
-
Совместная работа с защитой приватности: современные криптографические решения позволяют роботам совместно обучать модели и делиться инсайтами без раскрытия приватных или проприетарных данных.
-
Управление, основанное на сообществе: децентрализованные автономные организации (DAOs) управляют и контролируют работу роботов с помощью прозрачных и инклюзивных ончейн-правил и политик.
-
Кросс-морфологическая совместимость: открытые блокчейн-фреймворки способствуют бесшовному взаимодействию между различными платформами роботов, снижая издержки на разработку и ускоряя перенос возможностей.
-
Экономика автономных агентов: инфраструктура Web3 наделяет роботов независимым экономическим статусом, позволяя им осуществлять p2p-транзакции, вести переговоры и участвовать в токенизированных рынках без участия человека.
-
Децентрализованные физические инфраструктурные сети (DePIN): блокчейн-решения для p2p-обмена вычислениями, сенсорными, хранилищными и сетевыми ресурсами повышают масштабируемость и устойчивость роботизированных сетей.
Ниже приведены некоторые инновационные проекты, двигающие эту область вперёд и демонстрирующие потенциал и тенденции слияния AI-роботов и Web3. Разумеется, это только для ознакомления и не является инвестиционной рекомендацией.
Децентрализованная разработка данных и моделей
Платформы на базе Web3 демократизируют разработку данных и моделей с помощью стимулирования участников (например, костюмы захвата движения, совместное использование датчиков, загрузка изображений, разметка данных и даже генерация синтетических данных). Такой подход позволяет создавать более богатые, разнообразные и репрезентативные датасеты и модели, чем может позволить себе одна компания. Децентрализованные фреймворки также улучшают покрытие edge-кейсов, что критически важно для роботов, работающих в непредсказуемых условиях.
Примеры:
-
Frodobots: протокол для краудсорсинга реальных датасетов через игровые механики с роботами. Их проект «Earth Rovers» — это тротуарные роботы и глобальная игра «Drive to Earn», позволившие создать датасет FrodoBots 2K, включающий видеопотоки, GPS-данные, аудиозаписи и данные о ручном управлении, охватывающий более 10 городов и около 2000 часов дистанционного управления роботами.
-
BitRobot: крипто-стимулируемая платформа, совместно разработанная FrodoBots Lab и Protocol Labs, построенная на блокчейне Solana и архитектуре subnet. Каждый subnet — это публичный челлендж, где участники получают токены за предоставление моделей или данных, стимулируя глобальное сотрудничество и open-source инновации.
-
Reborn Network: базовый слой открытой экосистемы AGI-роботов, предоставляющий костюм Rebocap для захвата движений, позволяя любому записывать и монетизировать свои реальные движения, способствуя открытости сложных датасетов для гуманоидных роботов.
-
PrismaX: использует вклад глобального сообщества и децентрализованную инфраструктуру для обеспечения разнообразия и достоверности данных, внедряя мощные механизмы верификации и стимулов для масштабирования датасетов для роботов.
Доказательство происхождения и надёжности
Блокчейн обеспечивает end-to-end прозрачность и ответственность в экосистеме роботов. Он гарантирует верифицируемое происхождение данных и моделей, аутентификацию идентичности и физического положения роботов, а также ведёт прозрачную историю операций и участия контрибьюторов. Кроме того, кооперативная валидация, ончейн-репутация и механизмы верификации на основе стейкинга обеспечивают качество данных и моделей, предотвращая вред от низкокачественного или мошеннического ввода.
Примеры:
-
OpenLedger: AI-блокчейн-инфраструктура для обучения и развертывания специализированных моделей на датасетах, принадлежащих сообществу. Механизм «Proof of Attribution» гарантирует справедливое вознаграждение за качественный вклад в данные.
Токенизация собственности, лицензирование и монетизация
Нативные для Web3 инструменты интеллектуальной собственности поддерживают токенизированное лицензирование специализированных датасетов, возможностей роботов, моделей и интеллектуальных агентов. Контрибьюторы могут с помощью смарт-контрактов напрямую встраивать условия лицензии в свои активы, автоматически получая роялти при повторном использовании или монетизации данных/моделей. Такой подход способствует прозрачному, permissionless-доступу и формирует открытый и справедливый рынок данных и моделей для роботов.
Примеры:
-
Poseidon: полнофункциональный децентрализованный слой данных, построенный на Story Protocol, ориентированный на IP, предоставляющий легально авторизованные данные для AI-обучения.
Решения для защиты приватности
Данные, генерируемые в больницах, гостиничных номерах или домашних условиях, сложно получить через публичные каналы, но их богатый контекст может значительно повысить эффективность базовых моделей. Криптографические решения позволяют превращать приватные данные в ончейн-активы, делая их отслеживаемыми, компонуемыми и монетизируемыми при сохранении приватности. Технологии доверенных вычислительных сред (TEEs) и доказательств с нулевым разглашением (ZKPs) позволяют безопасно вычислять и верифицировать результаты без раскрытия исходных данных. Эти инструменты позволяют организациям обучать AI-модели на распределённых чувствительных данных, сохраняя приватность и соответствие требованиям.
Примеры:
-
Phala Network: позволяет разработчикам развёртывать приложения в защищённых TEE для конфиденциальной AI- и обработки данных.
Открытое и аудируемое управление
Обучение роботов обычно опирается на закрытые проприетарные системы с низкой прозрачностью и адаптивностью. Прозрачное и верифицируемое управление критически важно для снижения рисков и укрепления доверия пользователей, регуляторов и бизнеса. Технологии Web3 позволяют сообществу управлять развитием open-source интеллекта для роботов через ончейн-механизмы.
Примеры:
-
Openmind: открытый AI-нативный софтверный стек, помогающий роботам мыслить, учиться и работать совместно. Они предложили стандарт ERC7777 для создания верифицируемой регулируемой экосистемы роботов, с акцентом на безопасность, прозрачность и масштабируемость. Стандарт определяет интерфейсы для управления идентичностью людей и роботов, исполнения социальных правил и регистрации/удаления участников с чётким определением прав и обязанностей.
Заключительные мысли
Слияние AI-роботов и технологий Web3 знаменует собой новую эру, в которой автономные системы смогут масштабно сотрудничать и адаптироваться. Ближайшие 3–5 лет станут ключевыми: быстрый прогресс аппаратного обеспечения приведёт к появлению более мощных AI-моделей, основанных на богатых реальных датасетах и децентрализованных механизмах сотрудничества. Мы ожидаем, что специализированные AI-агенты появятся в гостиничном бизнесе, логистике и других отраслях, создавая огромные новые рыночные возможности.
Однако такое слияние AI-роботов и криптотехнологий несёт и вызовы. Проектирование сбалансированных и эффективных стимулов остаётся сложным и эволюционирующим процессом: система должна справедливо вознаграждать участников и предотвращать злоупотребления. Техническая сложность также велика — необходимо разрабатывать надёжные и масштабируемые решения для бесшовной интеграции различных типов роботов. Кроме того, технологии защиты приватности должны быть достаточно надёжными, чтобы заслужить доверие заинтересованных сторон, особенно при работе с чувствительными данными. Быстро меняющаяся нормативная среда требует осторожного подхода для обеспечения комплаенса в разных юрисдикциях. Решение этих рисков и достижение устойчивой отдачи — ключ к продвижению технологий и их широкому внедрению.
Давайте вместе следить за развитием этой сферы, способствовать прогрессу через сотрудничество и использовать возможности, возникающие на этом быстрорастущем рынке.
Инновации в робототехнике — это путь, который лучше проходить вместе :)
В завершение хочу поблагодарить Chain of Thought и их работу «Robotics & The Age of Physical AI» за ценный вклад в моё исследование.